PM Linearaktuator 42mm
Die sogenannten Digitale Linearaktuatoren (Kurzbezeichnung DLA) PM Linearaktuator 42mm basieren auf den kostengünstigen Aufbau. Es sind die sogenannten PM-Schrittmotoren ( Permanentmagent-Schrittmotoren) jedoch mit einer integrierter Gewindespindel. Durch die DLA-Technologie wird eine Einsparung von mechanischen Komponenten erzielt. Somit werden Kosten eingespart. Da über eine integrierter Gewindespindel die Dreh- in eine Linearbewegung umgesetzt wird, werden keine zusätzliche Komponenten benötigt. Mit Ø42mm Durchmesser erreicht der Motor bis zu 105N lineare Kraft. Alle Motore haben kugelgelagerte Rotoren.

Ø42mm PM Linearaktuator Non-Captive

| Typ | 42PM412B-T1 | 42PM414B-T1 | 42PM416T-B1 |
| Auflösung mm / Step | 0.0254 | 0.0508 | 0.1016 |
| Kraft Max. N | 105 | 83.4 | 55.6 |
| Strom mA. | 420 | 420 | 420 |
| Widerstand Ohm | 28.8 | 28.8 | 28.8 |
42PM Linearaktuator NON-Captive

Downloads
Mögliche mechanische Optionen
- Auflösung / Schritt: 0.0254mm / 0.0508mm / 0.1016mm
- Spindellänge nach Kundenwunsch
- Sondergewinde am Spindelende
- Sonderadapter am Spindelende
- Motor ohne Frontplatte
PM Linearaktuator 42mm Durchmesser
- Ventilsteuerung
- Verfahren von Linsen
- Positionieren von Farbfiltern
- Micro-Dosierung über Kolben / Injection
- Schließsysteme / Hausautomation
- Tropfenfänger
- Quetschen von Leitungen in Pumpen
- Verfahren von Laser
- Heben und Senken von Probeträgern
- Fixieren von Probeträgern in der Entnahmestelle
- Justierung Sensorik
Die Lösung für lineare Bewegung mit einer kompakten Baugröße!
PM Schrittmotor Linearaktuator 42mm Durchmesser
Digitale Linearaktuatoren (Kurzbezeichnung DLA) basieren auf den kostengünstigen Aufbau von sogenannten PM-Schrittmotoren ( Permanentmagent-Schrittmotoiren) mit integrierter, oder externer Gewindespindel.
Durch die DLA-Technologie erhalten sie eine Einsparung bei Platz sowie Kosten im Vergleich zu Linearbewegungs Lösungen bei denen an dem Motor noch eine externe Spindel montiert wird.
So verfügt der DLA also über eine integrierter Gewindespindel zur direkten Übertragung der Dreh- in eine Linearbewegung. Der Aufbau erfolgt auf Basis eines PM-Schrittmotor mit 7,5 oder 15 Grad.
Der Aufbau von PM Linearaktuator 42mm:
Bei dem PM Schrittmotor Linearaktuator besteht der Rotor Magnet aus einem thermoplastischen Kunststoff.
Mit einem speziellen, auf Lebensdauer ausgelegten Gewinde ausgespritzt, befindet sich der Rotor zwischen zwei in den Endkappen montierten Kugellagern.
Ihr Vorteil ist die Reduzierung von mechanischen Komponenten z.B. Antriebsriemen, Gewindespindeln sowie den Zeitaufwand für die Montage.
Verschiedene Bauformen:
DLA ohne Verdrehsicherung = non-captive
Die rotative Bewegung wird in eine lineare Bewegung umgesetzt, eine Verdrehsicherung erfolgt in der Anwendung des Kunden.
DLA mit Verdrehsicherung = captive
Die Spindel wird in 2 Teile aufgebaut:

Im vorderen Bereich der Spindel befindet sich eine Nut.
Durch die Nut wird die Spindel am verdrehen gehindert.
Kundenseitig wird somit keine Verdrehsicherung benötigt.
Die verstärkte Version des PM Schrittmotor Linearaktuator kann überdies recht hohe Verdrehkräfte aufnehmen.
Wie auf dem Bild zu sehen besitzt der Motor eine sehr stabile, sternförmige Verdrehsicherung

Zur Positioniergenauigkeit des PM Linearaktuator 42mm:
Ein Schrittfehler addiert sich nicht. Dadurch werden hohe Genauigkeiten bei allen Distanzen erreicht.
Eine aufwendige Positionsrückmeldung wird somit nicht benötigt!
Desweiteren erreichen sie mit Mikroschritt einen sehr ruhigen Lauf.
Die Positionsgenauigkeit lässt sich durch Micro-Step wie 1/32 Schritt oder höher nicht verbessern.
Der Rotor bewegt sich bei bei zu hohem Micro-Stepping in eine Position bewegt.
Diese liegt bei Halb- oder Vollschritt, je nachdem in welcher Position sich der Rotor befindet
Was dürfen wir für Sie Positionieren?
Wir freuen uns auf Ihre Anfrage.
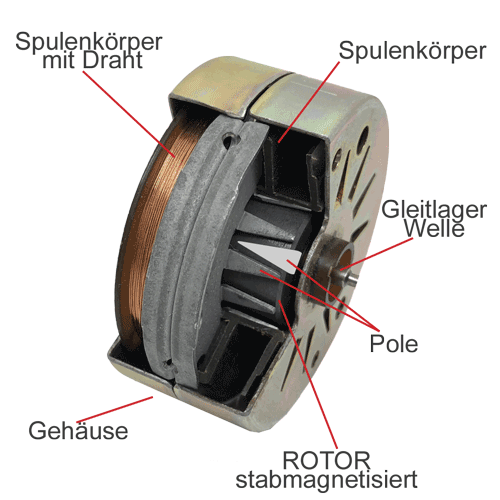
Was ist ein PM-Schrittmotor?
Ein PM-Schrittmotor oder auch Permanentmagnet Schrittmotor hat einem zylindrischen, stabmagnetisierten Rotor.
Der magnetisierte Rotor mit abwechselnden Nord / Südpol hat einen magnetischen Kreis zu den Polen des Stators (Im Bild als POLE bezeichnet).
Im stromlosen Zustand ist das Rasten der einzelnen Magnetpole durch drehen der Motorwelle zu spüren.
Werden die Spulen nun abwechselnd bestromt ensteht ein Drehfeld welches der Rotor folgt.
Schnitt eines PM-Schrittmotor:
Kann der PM Linearaktuator mit +12V und Gnd wie ein DC Motor betrieben werden?
Das ist nicht möglich.
Ein Linearaktuator ist ein Schrittmotor welcher die Rotation des Rotors in eine lineare Bewegung umsetzt.
Es wird immer ein Schrittmotortreiber benötigt.
Was heisst DLA?
DLA bedeutet: Digitaler Linear Aktuator
Darf der Motor blockiert werden um z.B. eine Endlage zu erkennen?
Nach Möglichkeit sollten die Motore nicht blockiert werden. Ein immer wiederkehrendes Blockier-Moment kann auf Dauer die Kugellager und Mutter im Motor zerstören.
Kann die Spindel spielfrei geliefert werden ( Vorspannung / Kugelrollspindel)?
Leider ist es nicht möglich die Spindel spielfrei aufzubauen. Soll die Spindel spielfrei laufen, so sollte die Spindel immer mit z.B. einer Feder in eine Richtung belastet werden, so dass die Flanke an der Mutter anliegt.
Generell kann aufgrund der Baugröße keine Kugelrollspindel geliefert werden.
Warum ist die Motornennspannung viel niedriger als die Versorgungsspannung des Schrittmotor-Treibers?
Die angegebene Spannung bei den Schrittmotoren ergibt sich aus dem Wicklungswiderstand und dem maximal zulässigen Wicklungsstrom.
(Ohm’sches Gesetz R=U/I bzw. U=R*I).
Beispiel:
| Beispiel Daten auf einem Schrittmotor | Spannung | Wicklungswiderstand | Berechnung | Phasenstrom |
| Angabe | 5V | 20 Ohm | = | 250mA |
Bei dem Schrittmotor-Treiber z.B. L297 wird in der Auslegung der Schaltung der Strom auf 250mA eingestellt.
Der eingestellte Strom wird durch den Treiber per PWM Stromregelung geregelt.
Man spricht von einer Konstant-Strom-Steuerung.
Somit lässt der Treiber nur den eingestellten Strom zum Motor durch.
Der Treiber kann mit z.B. 12V DC oder mehr betrieben werden ohne das der Motor mit einer Spannungsangabe von 5V Schaden nimmt.
Würde man hingegen einfach nur Spannung an die Wicklung legen (einfache Brücke aus Transistoren, ohne Stromregelung, ohne PWM o.ä.), darf in diesem Fall die Spannung nur maximal so groß sein wie die aufgeführte Motornennspannung, in diesem Fall 5V DC.
Diese Betriebsart nennt man Konstant-Spannung-Steuerung. Hier wird mit lediglich 4 Transistoren (unipolarer Motor) bzw. 2 H-Brücken (bipolarer Motor) eine sehr kostengünstige Schaltung realisiert. Es ist aber kein Mikroschritt möglich und die Performance der Motore ist weit geringer.
Negativ-Beispiel:
Eine Spannung von z.B 12V durch eine einfache H-Brücke an einem 5V Schrittmotor hätte eine Zerstörung des Motors zur Folge.
Berechnung: U = 12V / 20 Ohm I = 600mA
Der Motor zieht somit 600mA anstelle der erlaubten max. 250mA, somit würde er sehr Heiß werden.
Nach kurzer Zeit eine zerstörte Wicklung aufweisen. Der Motor wäre nun irreparabel zerstört.
Kann der Motor im Micro-Stepping wie 1/ 32 oder 1/64 Step genau postionieren?
Die PM Schrittmotore laufen sehr leise im Microstepping.
Aber eine Erhöhung der Auflösung funktioniert sicher meist nur bis zu 1/2 Schritt.
Wird der Motor im 1/64 Schritt positioniert, kann es oder besser gesagt wird es passieren, dass der Rotor sich ein eine stabile Lage bewegt.
Dies wäre dann der Vollschritt oder der Halbschritt.
Je nach Treiber oder Anwendung reagieren die PM Linearaktuatoren sehr unterschiedlich.
Kann die Spindel demontiert werden?
Die Spindel der Non-Captiven Motore kann herausgeschraubt werden.
Das demontieren hat mit großer Vorsicht zu erfolgen um nicht die Mutter zu beschädigen.
Ein herausziehen der Spindel bei Motoren die keine hohe Selbsthemmung aufweisen ist auf jeden Fall zu vermeiden
Kann der Motor geöffnet / zerlegt werden?
Nein, die PM-Motore sind verschweißt. Es ist kein Öffnen der Motore ohne Zerstörung möglich.
Kann sich ein Fehler der Spindel aufsummieren und zu einem Positionier-Fehler führen?
Nein. Die Fehler in der Gewindesteigung wird nicht aufsummiert.
Auch wird der Schrittwinkelfehler des Motors nicht aufsummiert.
Muss die Spindel geschmiert werden?
Nein, die Spindeln sind auf Lebensdauer geschmiert.