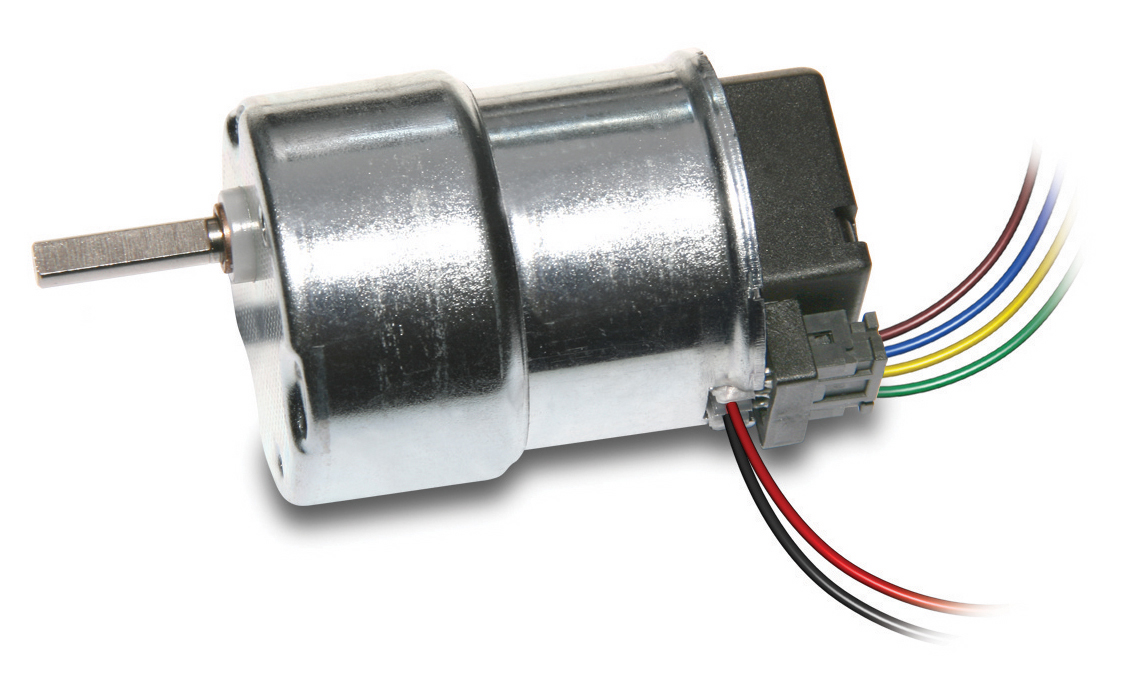
MicroMotors BS138F DC-Motor mit Stirnradgetriebe MicroMotors BS138F.4/12 DC-Motor mit Stirnradgetriebe für höhere Drehzahl
Ø34mm Baulänge 37.5mm / Drehzahl 1.6 – 320 rpm / Nenn-Moment 1.5 – 50Ncm
Der MicroMotors BS138F DC-Motor mit Stirnradgetriebe von MicroMotors zeichnet sich durch hohe Lebensdauer und sehr geringer Geräuschentwicklung aus. Der Motor verfügt über Metall-Bürsten und somit ein geringe EMV Belastung. Die Getriebekappe ist aus Metall mit eingelassenem Gewinde. Die Bürsten des Gleichstrommotor bestehen aus Präzision Metall Bürsten (AU-AG-CU). Die Serie BS138F.4/12 Serie hat eine höhere Drehzahl aber dennoch einen leisen Lauf. Das Gewinde im Metallgehäuse für einfache Montage des Getriebes an ihre Anwendung. Alle Getriebe verfügen über Metallzahnräder. Die Gleichstrommotore sind in 6V und 12V DC Lieferbar. Optional mit Encoder lieferbar.
Maximale Wellen-Belastung: radial 20N – axial 5N | Temperaturbereich: -20°/ 60° | Gewicht ca. 90g


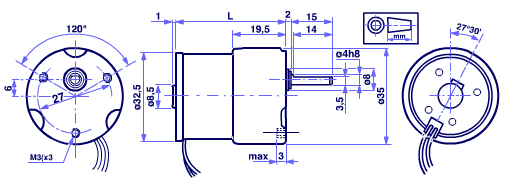
MicroMotors BS138F DC-Motor mit Stirnradgetriebe
Baulänge L = 40mm
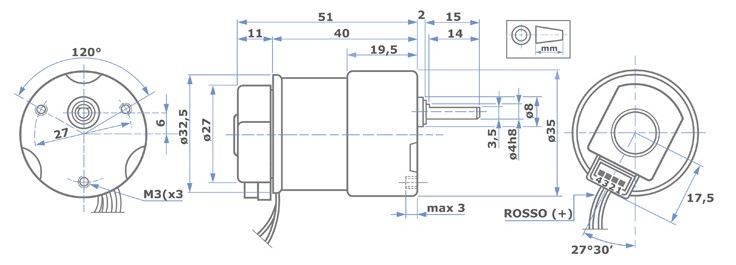
Abmessungen BS138 mit Encoder 2S
| MicroMotors Standard | MicroMotors Encoder | Volt DC | i 1: | Nenn-Moment Ncm | Nenn-Drehzahl rpm | Nenn-Strom mA |
| BS138F-6-12 BS138F-12-12 BS138F-4/12-12 | BS138F-2S-6-12 BS138F-2S-12-12 BS138F-2S-4/12-12 | 6 12 12 | 12 | 1.5 | 155 155 250 | 100 55 80 |
| BS138F-6-21 BS138F-12-21 BS138F-4/12-21 | BS138F-2S-6-21 BS138F-2S-12-21 BS138F-2S-4/12-21 | 6 12 12 | 21 | 2.5 | 85 85 150 | 100 55 80 |
| BS138F-6-36 BS138F-12-36 BS138F-4/12-36 | BS138F-2S-6-36 BS138F-2S-12-36 BS138F-2S-4/12-36 | 6 12 12 | 36 | 4 4 4.2 | 53 53 108 | 95 50 80 |
| BS138F-6-72 BS138F-12-72 BS138F-4/12-72 | BS138F-2S-6-72 BS138F-2S-12-72 BS138F-2S-4/12-72 | 6 12 12 | 72 | 7 7 8.2 | 28 28 43 | 95 50 80 |
| BS138F-6-149 BS138F-12-149 BS138F-4/12-149 | BS138F-2S-6-149 BS138F-2S-12-149 BS138F-2S-4/12-149 | 6 12 12 | 149 | 14 14 | 13 13 20 | 95 50 80 |
| BS138F-6-208 BS138F-12-208 BS138F-4/12-208 | BS138F-2S-6-208 BS138F-2S-12-208 BS138F-2S-4/12-208 | 6 12 12 | 208 | 20 20 | 9 9 14 | 95 50 80 |
| BS138F-6-608 BS138F-12-608 BS138F-4/12-608 | BS138F-2S-6-608 BS138F-2S-12-608 BS138F-2S-4/12-608 | 6 12 12 | 608 | 50 50 | 3.3 3.3 5.3 | 90 48 80 |
| BS138F-6-1470 BS138F-12-1470 | BS138F-2S-6-1470 BS138F-2S-12-1470 | 6 12 | 1470 | 50 50 | 1.6 | 58 30 |
DOWNLOADS
Optionen:
- Stecker
- Kabellänge
- Encoder 2 x 3 pulse pro Umdrehung um 90° Versetzt
- Sonderwelle
Anwendungen für MicroMotors BS138F DC-Motor mit Stirnradgetriebe
- Peristaltik-Pumpe
- Proben-Arm positionieren
- Schlauch-Quetschventil in der Ventiltechnik
- Spindelantrieb Messtechnik mit Encoder
- Formatverstellung
- Positionierung Probenträger Medizintechnik
- Drehteller für Warenpräsentation
- Klappen verfahren für Lüftungsapplikationen
- Futterautomaten
- Verfahren von Gerätedeckel in der Medizintechnik
MicroMotors BS138F DC-Motor mit Stirnradgetriebe
MicroMotors BS138F DC-Motor mit Encoder 2S
Die Reihenfolge des Pulsausgang A-B ist Abhängig der Polarität und infolgedessen die Drehrichtung des Motors.
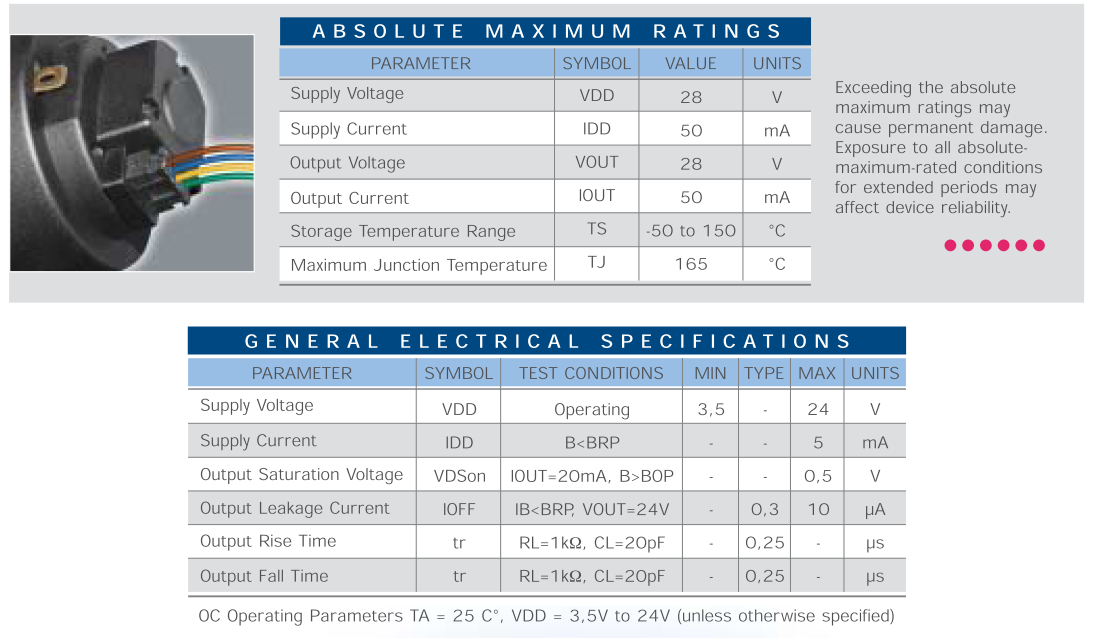
HALL-Sensor:
Um für Ihre Anwendung die größtmögliche Sicherheit in der Lebensdauer der Motore zu ereichen sind folglich die Hall-Sensoren und der Chip sind als hochtemperaturstabile und sehr robuste Sensoren aufgebaut.
Steile Flanken und ein geringes Überschwingen der Pulse erlauben schließlich ein genaues Erfassen der Position.
Jeder 2×3 Polige 2S-Encoder MicroMotors enthält obendrein auf einem einzigen Siliziumchip:
- den Spannungsregler
- Hall Spannungsgenerator
- Schaltung für Temperaturstabilität
- Signal Schmitt-Chopper-stabilisierten Verstärker
- Schmitt-Trigger
- offene Drain-MOSFETS
Demzufolge baut der Encoder sehr kompakt auf.
Ebenfalls erlaubt der Onboard Regler den Betrieb mit einer Versorgungsspannungen von 3,5 bis 24V.
Der Mosfet-Ausgang mit bis zu 20 mA belastbar, dass heißt der Encoder kann direkt mit bipolaren-Schaltungen oder MOS-Logikschaltungen verwendet werden.
Sechs-Poliger Hall Sensor MicroMotors 2S
BS138 DC Getriebe Motor mit Encoder 2S
Anschluss Encoder:
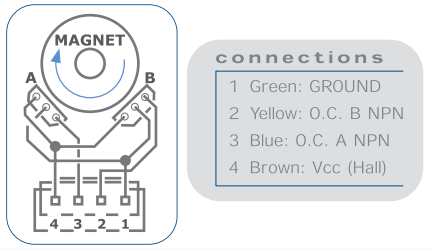
Hall- Sensor Anschluss 2S Encoder MicroMotors
Encoder Werte MicroMotors 2S Hall Sensor