MicroMotors RH158 RH159 DC Getriebemotor DC Motor
Der DC Getriebemotor RH158 und RH159 von MiocroMotors hat einen Ø39.6mm und eine Baulänge 64-72mm. Erhältlich in den Drehzahlen 4.5- 440 rpm und einem Nenn-Moment von 10 – 100 Ncm. Ein besonders stabiles Gleitlager am Wellenausgang erlaubt eine radiale Belastung von bis zu 50 N und ein Dauer-Abtriebsmoment von 1Nm. Die Ritzel sind auf Präzisions-Nadeln gelagert und auf Lebensdauer geschmiert. Somit entfällt eine Wartung und Nachschmierung. Somit der zuverlässige Langläufer für Ihre Anwendung. Ideal für Applikationen wie z.B. Peristaltikpumpen, Formatverstellung, öffenen und schließen von Gerätedeckeln, Verriegeln von Türen in Maschinen. Unterschied RH158 / RH159: Bei der Variante RH159 wird ein langsam laufender Motor verwendet. Somit ist die Eingangsdrehzahl zum Getriebe geringer und der Motor läuft besonders leise. Bei der höchsten Untersetzung wird eine Drehzahl von 4.5 RPM erreicht. Einbau der Motore ist in jeder Lage möglich.
Die Gleichstrommotore RH158 und RH159 sind in 12V und 24V DC lieferbar | Qualitäts DC Motor mit Kohlebürsten | Version Low-Speed RH159 sehr leiser Lauf | stabiles Gleitlager am Wellenausgang | Hochwertiges Getriebe für 100% ID ausgelegt | bis 1Nm Dauermoment | Optional Encoder 2×3 Pulse | Getriebe ist optional mit einem PM-Schrittmotor lieferbar | Metallzahnräder | Maximale Wellen-Belastung: radial 50N – axial 10N | Temperaturbereich: -20°/ 60° | Gewicht ca. 190g



MicroMotors RH 158 / RH 159 DC Getriebe Motor Baulänge = L 64-72mm

Abmessungen RH158 / RH159 Motor mit Encoder 2S

MicroMotors Getriebemotor DC Motor
| MicroMotors | MicroMotors Encoderversion | Volt DC | Untersetzung i 1: | Nenn-Moment Ncm | Nenn-Drehzahl rpm | Nenn-Strom mA |
| RH158-12-15 RH158-24-15 | RH158-2S-12-15 RH158-2S-24-15 | 12 24 | 15 | 10 | 300 | 660 330 |
| RH158-12-30 RH159-12-30 RH158-24-30 RH159-24-30 | RH158-2S-12-30 RH159-2S-12-30 RH158-2S-24-30 RH159-2S-24-30 | 12 12 24 24 | 30 | 20 15 20 15 | 140 70 140 70 | 660 250 330 130 |
| RH158-12-75 RH159-12-75 RH158-24-75 RH159-24-75 | RH158-2S-12-75 RH159-2S-12-75 RH158-2S-24-75 RH159-2S-24-75 | 12 12 24 24 | 75 | 50 40 50 40 | 55 28 55 28 | 680 230 340 125 |
| RH158-12-100 RH159-12-100 RH158-24-100 RH159-24-100 | RH158-2S-12-100 RH159-2S-12-100 RH158-2S-24-100 RH159-2S-24-100 | 12 12 24 24 | 100 | 60 40 60 40 | 45 22 45 22 | 680 240 340 130 |
| RH158-12-200 RH159-12-200 RH158-24-200 RH159-24-200 | RH158-2S-12-200 RH159-2S-12-200 RH158-2S-24-200 RH159-2S-24-200 | 12 12 24 24 | 200 | 100 80 100 80 | 23 10 23 10 | 580 250 290 130 |
| RH158-12-250 RH159-12-250 RH158-24-250 RH159-24-15 | RH158-2S-12-250 RH159-2S-12-250 RH158-2S-24-250 RH159-2S-24-15 | 12 12 24 24 | 250 | 100 100 100 100 | 21 8.5 21 8.5 | 500 240 250 125 |
| RH158-12-510 RH159-12-510 RH158-24-510 RH159-24-510 | RH158-2S-12-510 RH159-2S-12-510 RH158-2S-24-510 RH159-2S-24-510 | 12 12 24 24 | 510 | 100 100 100 100 | 10.5 5 10.5 5 | 300 150 150 80 |
| RH158-12-630 RH159-12-630 RH158-24-630 RH159-24-630 | RH158-2S-12-630 RH159-2S-12-630 RH158-2S-24-630 RH159-2S-24-630 | 12 12 24 24 | 630 | 100 100 100 100 | 9 4,5 9 4,5 | 270 130 135 70 |
DOWNLOADS
Optionen für MicroMotors RH158 / RH159 DC Getriebemotor
- Encoder 2 x 3 pulse pro Umdrehung um 90° Versetzt
- Sonderwelle
- Stecker
- Kabellänge
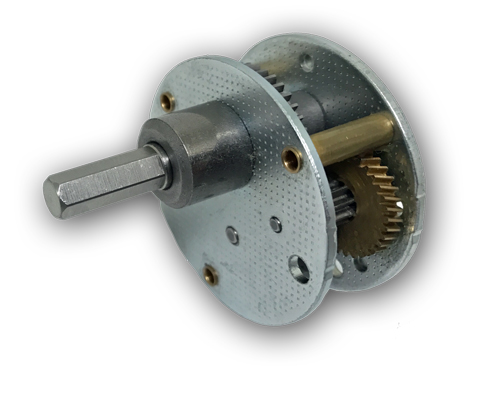
Beispiel Sonderwelle 6 Kant für das RH-Getriebe
RH Getriebe ist ebenfalls mit einem Schrittmotor ausrüstbar.

Anwendungen für MicroMotors RH158 / RH159 DC Getriebemotor
- Peristaltik-Pumpe
- Proben-Arm positionieren
- Schlauch-Quetschventil in der Ventiltechnik
- Spindelantrieb Messtechnik mit Encoder
- Formatverstellung
- Positionierung Probenträger Medizintechnik
- Drehteller für Warenpräsentation
- Klappen verfahren für Lüftungsapplikationen
- Futterautomaten
- Verfahren von Gerätedeckeln in der Medizintechnik
RH158 / RH159 DC Getriebe Motor MicroMotors mit Encoder
RH158 / RH159 MicroMotors mit Encoder
Sechs-Poliger Hall Sensor MicroMotors 2S
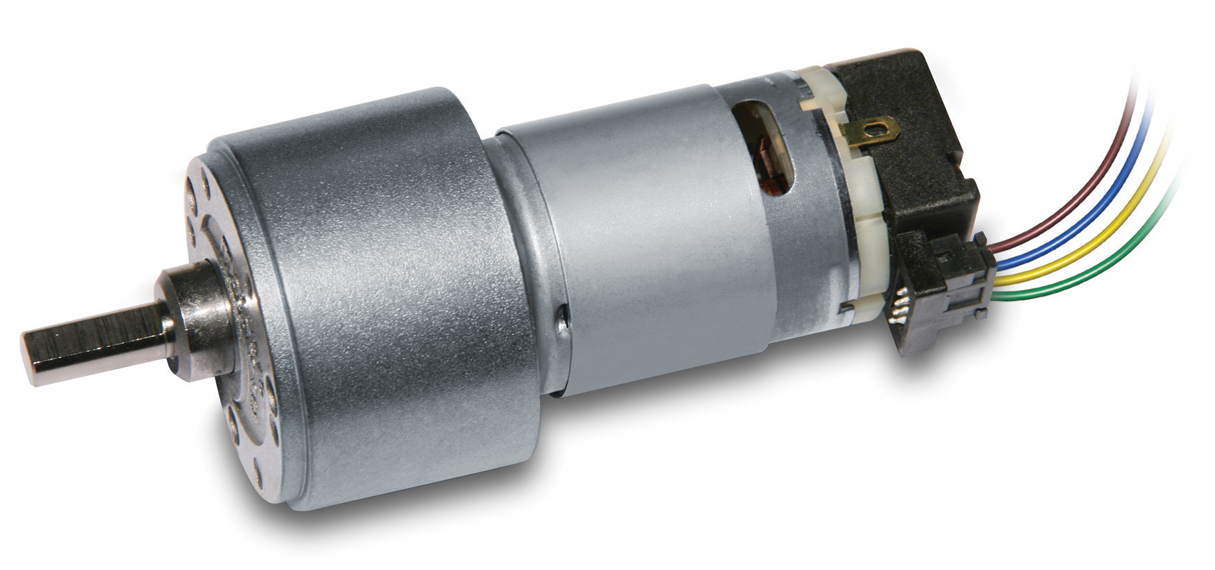
MicroMotors RH158 RH159 DC Getriebemotor DC Motor mit 2-S Encoder
Die Reihenfolge des Pulsausgang A-B ist Abhängig der Polarität und infolgedessen die Drehrichtung des Motors.
HALL-Sensor:
Um für Ihre Anwendung die größtmögliche Sicherheit in der Lebensdauer der Motore zu ereichen sind folglich die Hall-Sensoren und der Chip sind als hochtemperaturstabile und sehr robuste Sensoren aufgebaut.
Steile Flanken und ein geringes Überschwingen der Pulse erlauben schließlich ein genaues Erfassen der Position.
Jeder 2×3 Polige 2S-Encoder MicroMotors enthält obendrein auf einem einzigen Siliziumchip:
- den Spannungsregler
- Hall Spannungsgenerator
- Schaltung für Temperaturstabilität
- Signal Schmitt-Chopper-stabilisierten Verstärker
- Schmitt-Trigger
- offene Drain-MOSFETS
Demzufolge baut der Encoder sehr kompakt auf.
Ebenfalls erlaubt der Onboard Regler den Betrieb mit einer Versorgungsspannungen von 3,5 bis 24V.
Der Mosfet-Ausgang mit bis zu 20 mA belastbar, dass heißt der Encoder kann direkt mit bipolaren-Schaltungen oder MOS-Logikschaltungen verwendet werden.
Anschluss Encoder:
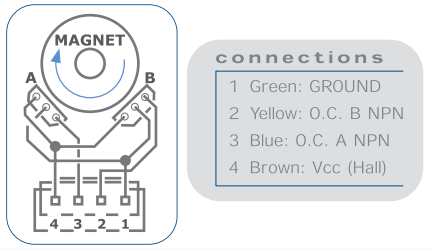
Hall- Sensor Anschluss 2S Encoder MicroMotors
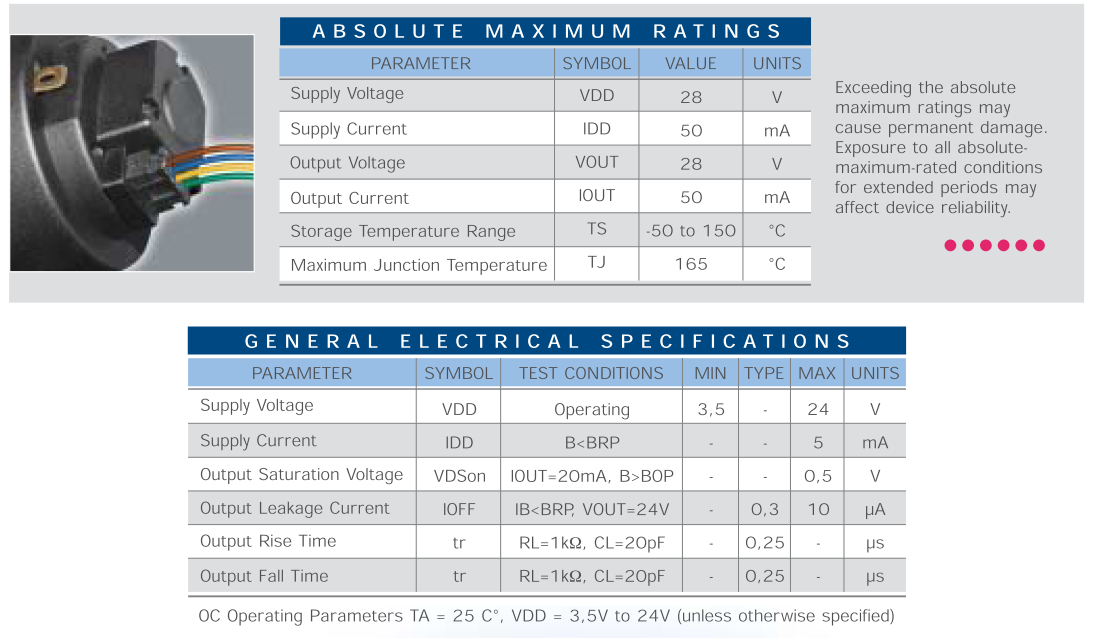
Encoder Werte MicroMotors 2S Hall Sensor